
ダウンロード 日本機械学会
Rm13 Program All R5
Rm13 Program All R4

Rm13 Program All R4
講演プログラム Rsj2011 第29回日本ロボット学会学術講演会
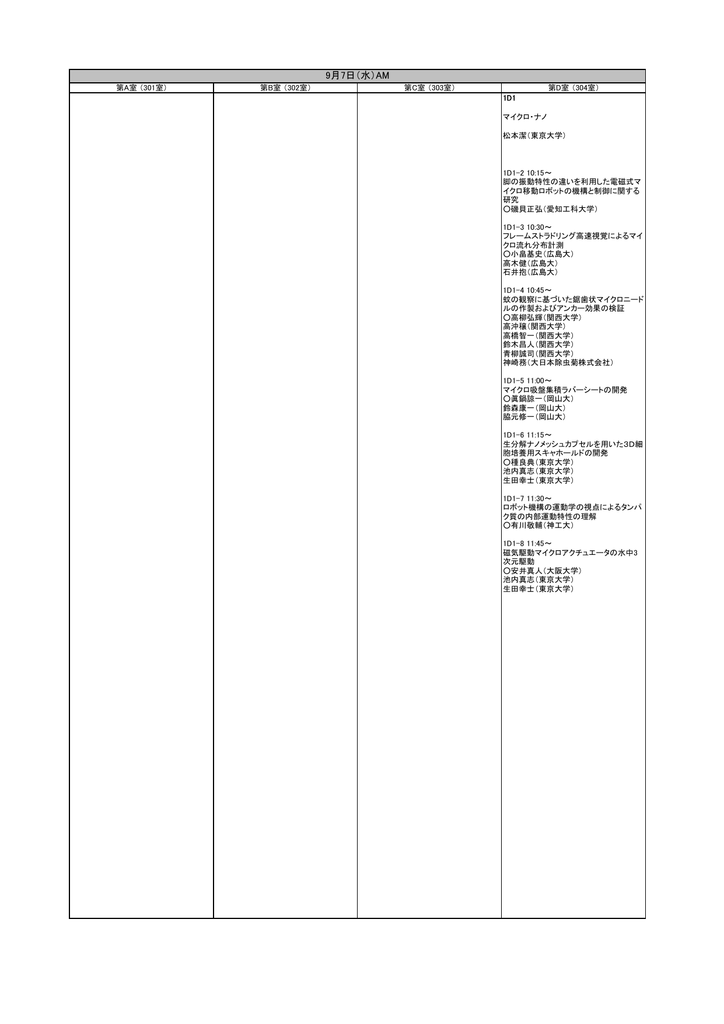
アクチュエータの機構と制御 ロボティクス メカトロニクス講演会2015 In
アクチュエータの機構と制御 1 ロボティクス メカトロニクス講演会
Mechano System Group Akita Prefectural University

各ポスター講演のセッション割り当て

Rm13 Program All R4
2
Tags:
Archive





